
image featured from : popsci.com
Dikutip dari popsci, Sabtu (26/11/2022) Lautan itu besar, dan upaya kita untuk memahaminya sebagian besar masih berada di permukaan. Menurut Organisasi Kelautan dan Atmosfer Nasional, sekitar 80 persen dari biru besar “belum dipetakan, belum diamati, dan belum dijelajahi”.
Kapal adalah cara utama untuk mengumpulkan informasi tentang laut, tetapi biaya pengirimannya sering mahal. Baru-baru ini, pelampung robot yang disebut pelampung Argo telah hanyut mengikuti arus, menyelam ke atas dan ke bawah untuk melakukan berbagai pengukuran di kedalaman hingga 6.500 kaki. Tapi robot air baru dari lab di Caltech bisa menjelajah lebih dalam dan melakukan misi bawah air yang lebih disesuaikan.
“Kami sedang membayangkan sebuah pendekatan untuk penjelajahan laut global di mana Anda mengambil sekumpulan robot yang lebih kecil dari berbagai jenis dan mengisi lautan dengan mereka untuk melacak, untuk perubahan iklim, untuk memahami fisika lautan,” kata John O. Dabiri, seorang profesor aeronautika dan teknik mesin di California Institute of Technology.
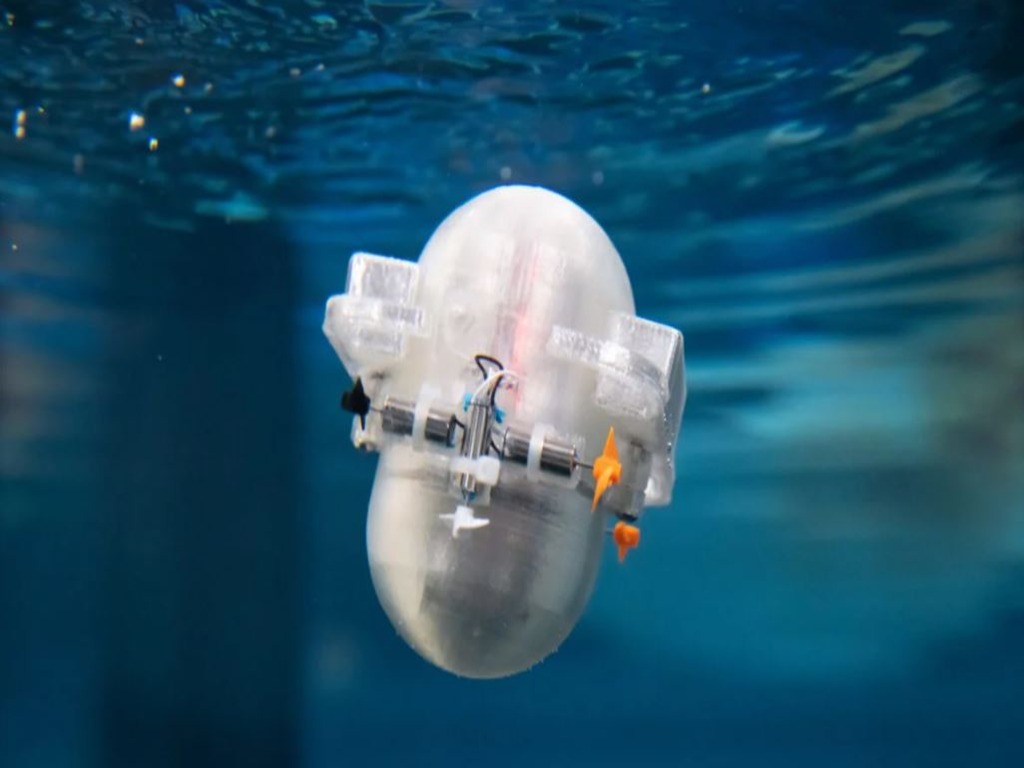
Datanglah CARL-Bot (Caltech Autonomous Reinforcement Learning Robot), robot air seukuran telapak tangan yang terlihat seperti persilangan antara kapsul pil dan gurita dumbo. Ia memiliki motor untuk berenang, berbobot agar tetap tegak, dan memiliki sensor yang dapat mendeteksi tekanan, kedalaman, akselerasi, dan orientasi. Semua yang CARL lakukan didukung oleh mikrokontroler di dalamnya, yang memiliki prosesor 1 megabita yang lebih kecil dari prangko.
CARL adalah inovasi lintas laut terbaru dari lab Dabiri, dibuat dan dicetak 3D di rumah oleh mahasiswa pascasarjana Caltech, Peter Gunnarson. Tes pertama yang dilakukan Gunnarson adalah di bak mandinya, karena laboratorium Caltech ditutup pada awal tahun 2021 karena COVID.
Saat ini, CARL masih bisa dikendalikan dari jarak jauh. Tetapi untuk benar-benar sampai ke bagian terdalam lautan, tidak boleh ada pegangan tangan yang terlibat. Itu berarti tidak ada peneliti yang memberikan arahan kepada CARL ia perlu belajar mengarungi samudra yang luas sendirian. Gunnarson dan Dabiri mencari ilmuwan komputer Petros Koumoutsakos, yang membantu mengembangkan algoritme AI untuk CARL yang dapat mengajarkannya untuk menyesuaikan diri berdasarkan perubahan di lingkungan terdekat dan pengalaman masa lalunya. Penelitian mereka dipublikasikan minggu ini di Nature Communications.
CARL dapat memutuskan untuk menyesuaikan rutenya dengan cepat untuk bermanuver di sekitar arus yang deras dan mencapai tujuannya. Atau dapat tetap berada di lokasi yang ditentukan menggunakan “energi minimal” dari baterai lithium-ion.
Kekuatan CARL terletak pada ingatan
Serangkaian algoritme yang dikembangkan oleh Koumoutsakos dapat melakukan kalkulasi pencarian jalan di atas robot kecil. Algoritme juga memanfaatkan memori robot dari pertemuan sebelumnya, seperti cara melewati pusaran air. “Kami dapat menggunakan informasi tersebut untuk memutuskan cara menavigasi situasi tersebut di masa mendatang,” jelas Dabiri.
Pemrograman CARL memungkinkannya untuk mengingat jalur serupa yang telah diambil dalam misi sebelumnya, dan “melalui pengalaman berulang, menjadi lebih baik dan lebih baik dalam mencicipi lautan dengan lebih sedikit waktu dan lebih sedikit energi,” tambah Gunnarson.
Banyak pembelajaran mesin dilakukan dalam simulasi, di mana semua titik datanya bersih. Tapi mentransfernya ke dunia nyata bisa jadi berantakan. Sensor terkadang kewalahan dan mungkin tidak mengambil semua metrik yang diperlukan. “Kami baru memulai uji coba di tangki fisik,” kata Gunnarson. Langkah pertama adalah menguji apakah CARL dapat menyelesaikan tugas sederhana, seperti menyelam berulang kali. Sebuah video pendek di blog Caltech menunjukkan robot itu dengan kikuk terombang-ambing dan terjun ke tangki air yang tenang.
Saat pengujian berlangsung, tim berencana untuk menempatkan CARL di tangki seperti kolam dengan jet kecil yang dapat menghasilkan arus horizontal untuk dinavigasi. Ketika robot lulus dari itu, ia akan pindah ke fasilitas setinggi dua lantai yang dapat meniru arus naik dan turun. Di sana, ia harus mencari cara untuk mempertahankan kedalaman tertentu di suatu wilayah di mana air di sekitarnya mengalir ke segala arah.
“Namun, pada akhirnya, kami menginginkan CARL di dunia nyata. Dia akan meninggalkan sarang dan pergi ke laut dan dengan percobaan berulang di sana, tujuannya adalah agar dia belajar cara menavigasi sendiri, ”kata Dabiri.
Selama pengujian, tim juga akan menyesuaikan sensor di dalam dan di CARL. “Salah satu pertanyaan yang kami miliki adalah set sensor minimal apa yang dapat Anda gunakan untuk menyelesaikan tugas tersebut,” kata Dabiri. Saat robot dilengkapi dengan alat seperti LiDAR atau kamera, “itu membatasi kemampuan sistem untuk bertahan lama di lautan sebelum Anda harus mengganti baterainya”.
Dengan meringankan beban sensor, peneliti dapat memperpanjang umur CARL dan membuka ruang untuk menambahkan instrumen ilmiah guna mengukur pH, salinitas, suhu, dan lainnya.
Perangkat lunak CARL dapat menginspirasi ubur-ubur bionik berikutnya
Awal tahun lalu, kelompok Dabiri menerbitkan sebuah makalah tentang bagaimana mereka menggunakan sengatan listrik untuk mengontrol pergerakan ubur-ubur. Menambahkan chip yang memiliki algoritme pembelajaran mesin serupa ke CARL mungkin saja akan memungkinkan peneliti mengarahkan jeli dengan lebih baik melalui lautan.
“Mencari tahu bagaimana algoritme navigasi ini bekerja pada ubur-ubur hidup nyata membutuhkan banyak waktu dan tenaga,” kata Dabiri. Dalam hal ini, CARL menyediakan wadah pengujian untuk algoritme yang pada akhirnya dapat masuk ke makhluk yang dimodifikasi secara mekanis. Tidak seperti robot dan penjelajah, ubur-ubur ini tidak memiliki batasan kedalaman, karena ahli biologi tahu bahwa mereka ada di Palung Mariana, sekitar 30.000 kaki di bawah permukaan.
CARL, dengan sendirinya, masih bisa menjadi aset yang berguna dalam pemantauan laut. Itu dapat bekerja bersama instrumen yang ada seperti pelampung Argo, dan melakukan misi solo untuk melakukan eksplorasi yang lebih baik, mengingat ia dapat mendekati dasar laut dan struktur rapuh lainnya. Ia juga dapat melacak dan mengikuti organisme biologis seperti sekumpulan ikan.
“Anda mungkin suatu hari nanti membayangkan 10.000 atau sejuta CARL (kami akan memberi mereka nama yang berbeda, saya kira) semuanya pergi ke laut untuk mengukur wilayah yang tidak dapat kami akses hari ini secara bersamaan sehingga kami mendapatkan waktu menyelesaikan gambaran tentang bagaimana lautan berubah, ”kata Dabiri. “Itu akan sangat penting untuk memodelkan prediksi iklim, tetapi juga untuk memahami cara kerja lautan.”
Milano – UKDW 2018



{kind=link}
Be the first to comment